The Project is to build a mobile robot with a developed neural network such that it evolves to avoid collisions into a circular vertical white wall while traveling at the fastest speed and straightest line possible without human intervention or external computers.
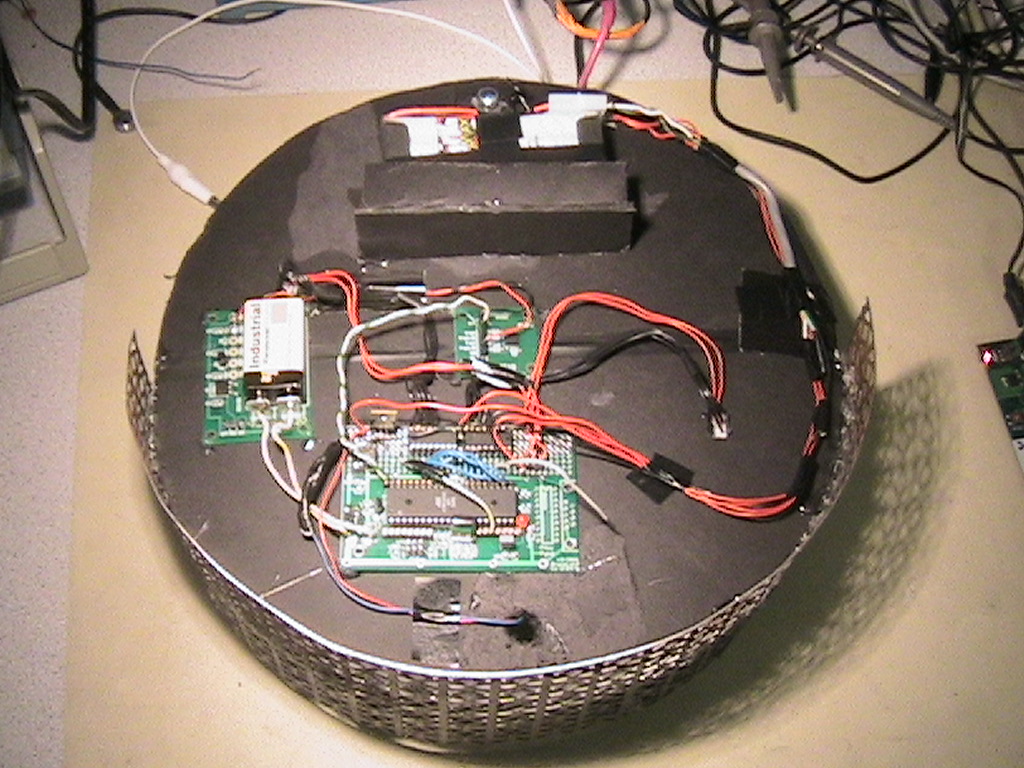
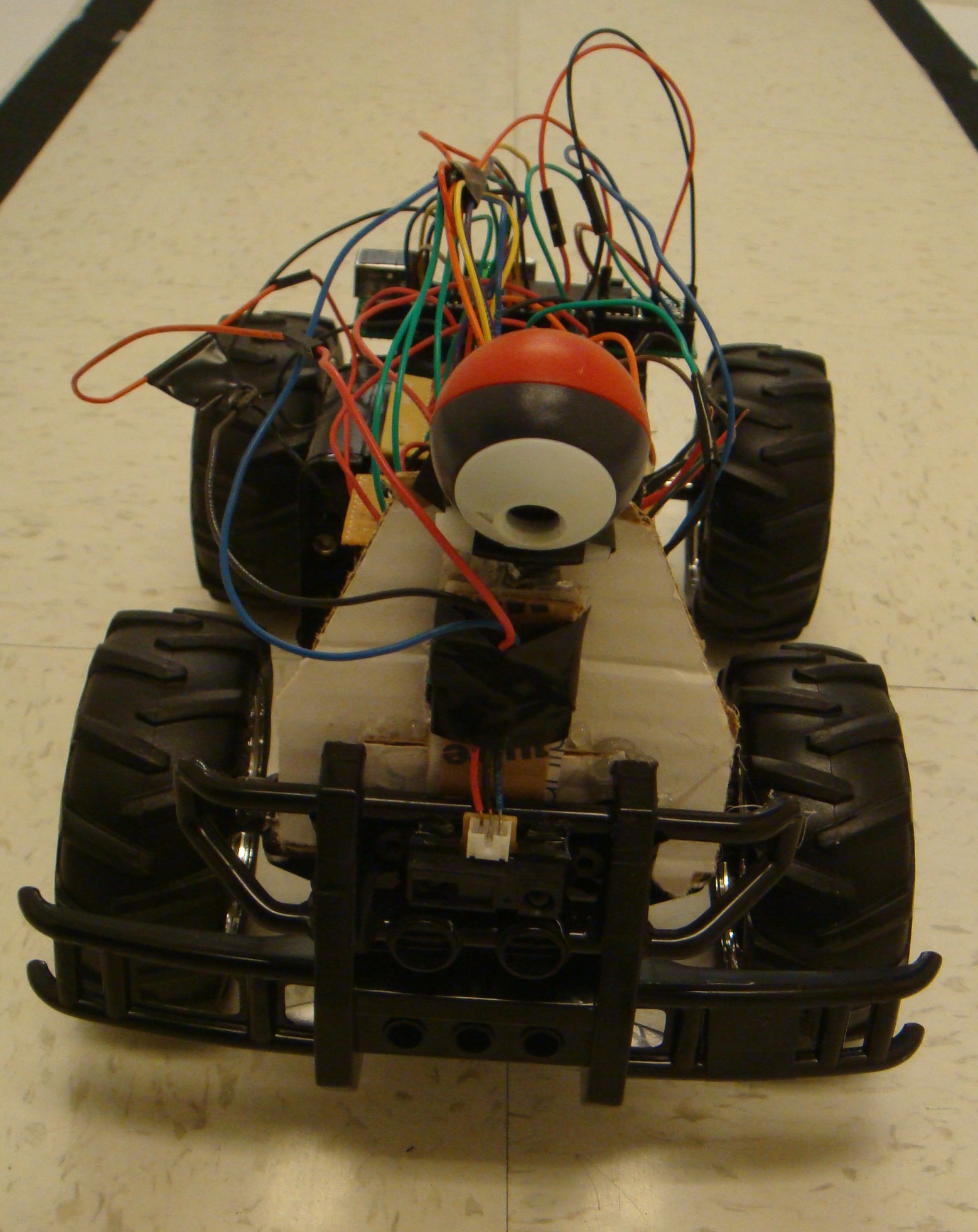
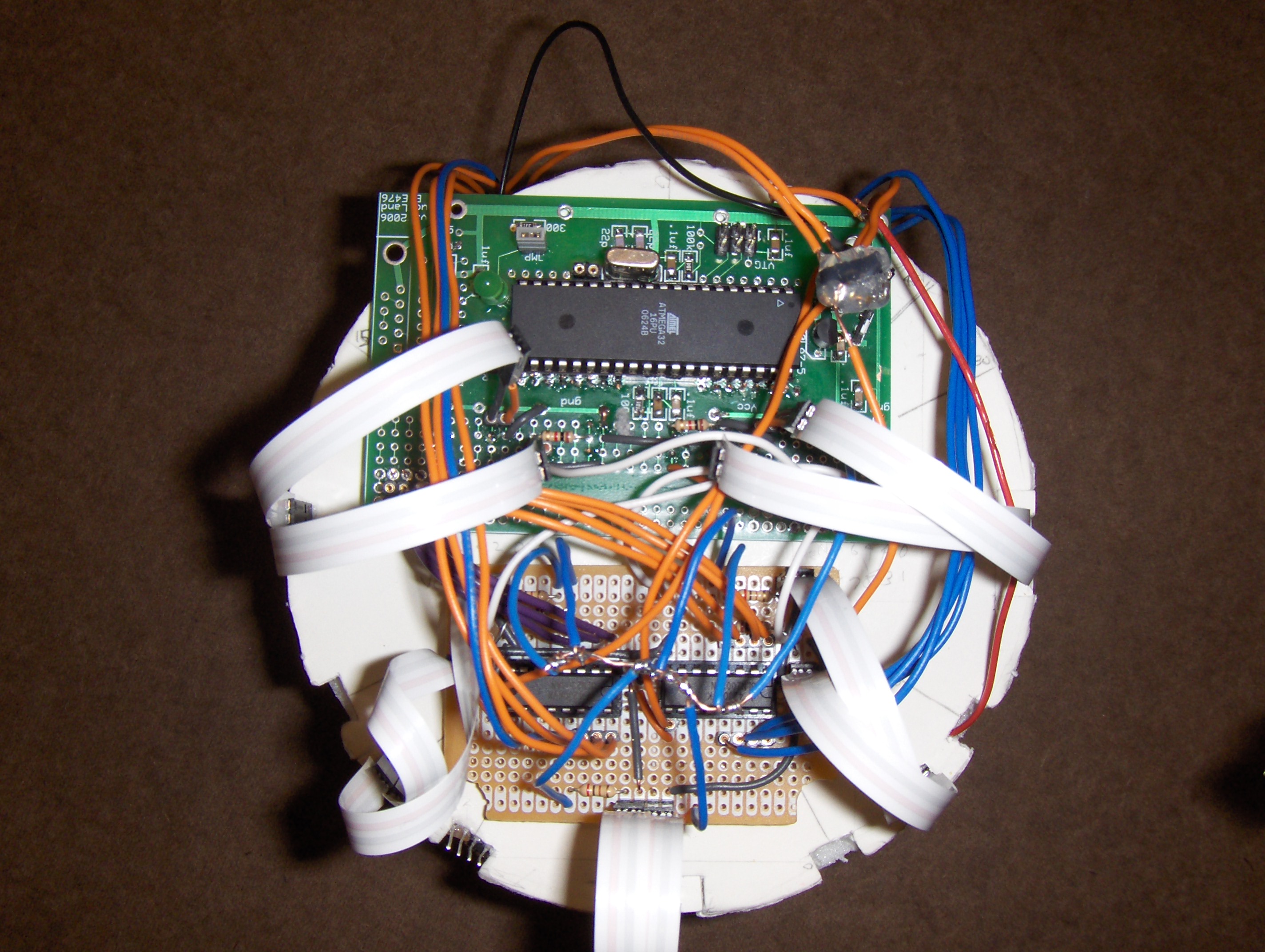
The completion of this project required extensive capacity and application on both hardware and software ends. In constructing the robot, we needed to build the custom prototype board, apply infrared sensors as neural inputs, implement stepper motors for robot motion, and provide a mobile power supply to the MCU. The purpose of these design factors is to allow the autonomous movement of the robot while minimizing the size of our robot, to accurately sense distance and collisions into the white wall of our arena, and to calculate the velocity precisely while providing sustainable torque to move our robot. On the software end, we needed to execute an evolutionary spiking neurons algorithm that interfaced with our hardware. The purpose of this was to integrate a spiking neural model with infrared sensors as inputs and motor speeds as outputs to determine robot velocity and direction. We also implemented the evolutionary model based on assessing random individuals of a randomly generated population through a fitness equation and improving the population by discarding the worst individual in the population with the worst fitness. The fitness equation measured by the velocity of the robot, the direction change, and the amount of activity from sensors.
The completion of this project required extensive capacity and application on both hardware and software ends. In constructing the robot, we needed to build the custom prototype board, apply infrared sensors as neural inputs, implement stepper motors for robot motion, and provide a mobile power supply to the MCU. The purpose of these design factors is to allow the autonomous movement of the robot while minimizing the size of our robot, to accurately sense distance and collisions into the white wall of our arena, and to calculate the velocity precisely while providing sustainable torque to move our robot. On the software end, we needed to execute an evolutionary spiking neurons algorithm that interfaced with our hardware. The purpose of this was to integrate a spiking neural model with infrared sensors as inputs and motor speeds as outputs to determine robot velocity and direction. We also implemented the evolutionary model based on assessing random individuals of a randomly generated population through a fitness equation and improving the population by discarding the worst individual in the population with the worst fitness. The fitness equation measured by the velocity of the robot, the direction change, and the amount of activity from sensors.
Download Project:
http://www.mediafire.com/?o8u0kfu4386kr1c