

ur project was mainly designed for the Cornell Mars Rover project team (CMR), which will be using the robotic arm for competition to complete many different tasks in the deserts of Southern Utah.
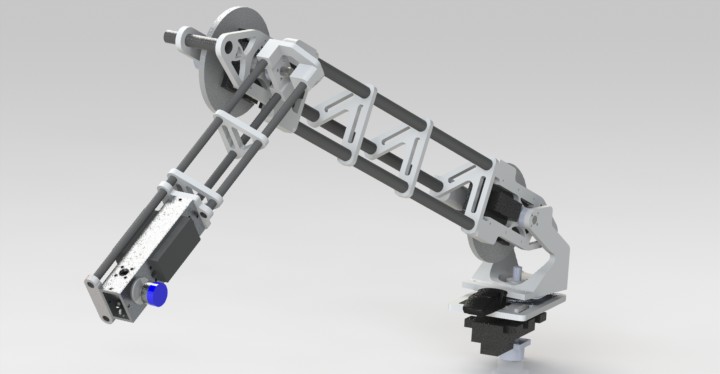
We created the control systems for a robot arm that is able to use three different end attachments to perform a variety of specified actions, include pushing buttons, scooping up dirt or other items, picking things up with a hook, flicking switches, and taking voltage readings for solar panels. This robot arm uses the Arduino Mega2560 to take in commands from a user to determine which position to move to and what actions the arm needs to perform. It uses four different servo motors to control the four degrees of freedom over the wrist, elbow, and shoulder joints. Also, it controls three end attachments that are attached at the end of the arm: the hook, the scoop, and the control panel interface (CPI). Our controls are also able to open and close the scoop‟s lid servo and turn on and off the brush of the CPI, which has two probes attached that takes the voltage readings.
 For Full Project Download here:
For Full Project Download here:
http://www.mediafire.com/view/?4msc6ondf00mhns
We created the control systems for a robot arm that is able to use three different end attachments to perform a variety of specified actions, include pushing buttons, scooping up dirt or other items, picking things up with a hook, flicking switches, and taking voltage readings for solar panels. This robot arm uses the Arduino Mega2560 to take in commands from a user to determine which position to move to and what actions the arm needs to perform. It uses four different servo motors to control the four degrees of freedom over the wrist, elbow, and shoulder joints. Also, it controls three end attachments that are attached at the end of the arm: the hook, the scoop, and the control panel interface (CPI). Our controls are also able to open and close the scoop‟s lid servo and turn on and off the brush of the CPI, which has two probes attached that takes the voltage readings.
http://www.mediafire.com/view/?4msc6ondf00mhns
No comments:
Post a Comment